esp8266 4线风扇调速测速
1.主板4针风扇接口
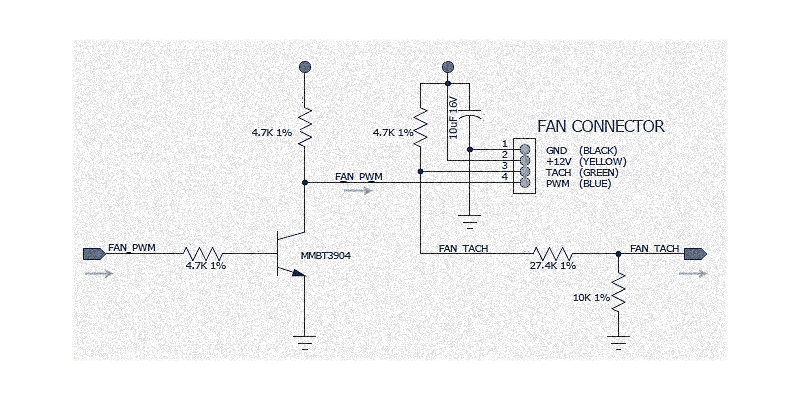
先从一张年代久远的图说起,听说是intel的规范,2003年的,
给出了了主板4针风扇接口的外围电路设计,咱就参考这个测试:
目前4pin接口主流的线序
😥和上图有点不一样,看仔细了
| 引脚编号 | 导线颜色 | 引线定义 |
|---|---|---|
| 1 | 黑 | GND |
| 2 | 红 | +12V |
| 3 | 黄 | 测速线 |
| 4 | 蓝 | 调速线 |
2.电路分析
1,2号引脚
负责风扇供电,风扇是外转子无刷电机,没有机械式换向器(使用半导体换向器),因此不会产生碳刷交替时的电压,所以Intel只并一个铝电解电容对电源进行低频滤波,不知道这样理解对不对?
3号引脚
输出风扇转速,用4.7k上拉到12V电源,再接27.4k和10k两个电阻分压,FAN TACH测速线从10k分压测量脉冲信号,粗略计算一下,FAN TACH的高电平为2.85V,匹配3.3V系统的逻辑电平,所以esp8266的GPIO引脚可以测量
😳为什么肯定3号线输出的是电平信号而不是模拟电压?
题主没有示波器,调节4线风扇的转速时,先没有用3号引脚的外围电路,直接用万用表测量3号引脚,其电压范围差不多0.02V~0.18V,推测这个引脚不能输出高电平但有内部上拉电阻,接着搭建了外围电路,在FAN TACH位置进行测量,发现无论怎样调速,电压保持1.51V左右不变,假设为电平信号计算的高电平为2.85V,那么可以肯定该引脚输出一个占空比约为50%,频率随转速变化的TTL信号
4号引脚
调节风扇的转速,使用NPN晶体管,型号MMBT3904,40V 100mA,集电极和发射极串接两个4.7k限流
3.测试准备
原理图
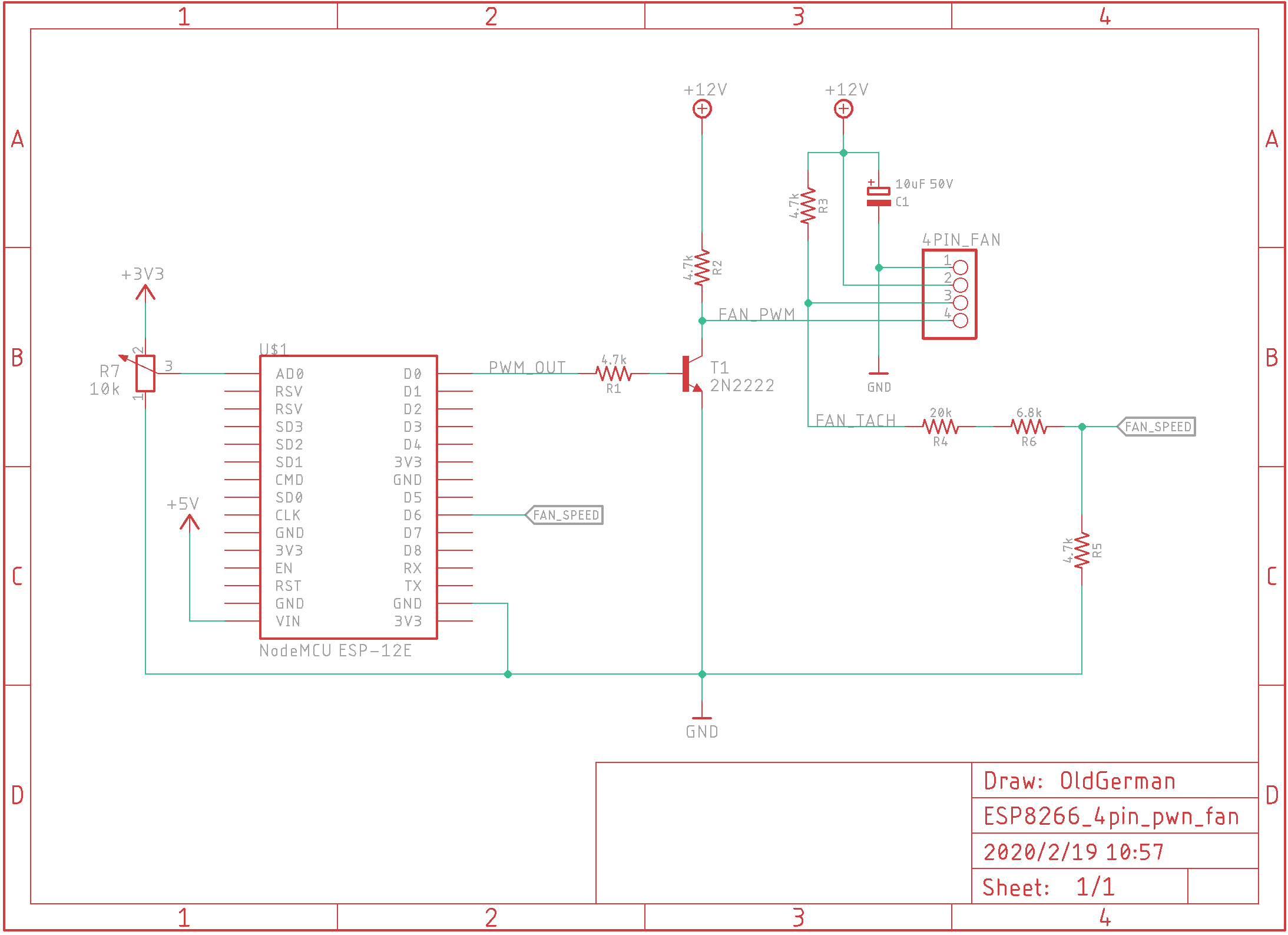
开发板为NodeMCU 1.0 ESP-12E
R7为10k电位器,接入A0读取模拟量
T1为三极管,用2N222A代替,参数40V 600mA,集电极限流电阻建议1-4.7k
C1为滤波电容,推荐钽电容或铝电解
英特尔的图27.4k用R4 20k和R5 6.8k代替,合计26.8k,FAN_SPEED高电平增加到2.89V
12V电源和开发板必须共地,否则三极管不能正常开关,无法调速
NodeMCU 1.0 可产生PWM信号的引脚
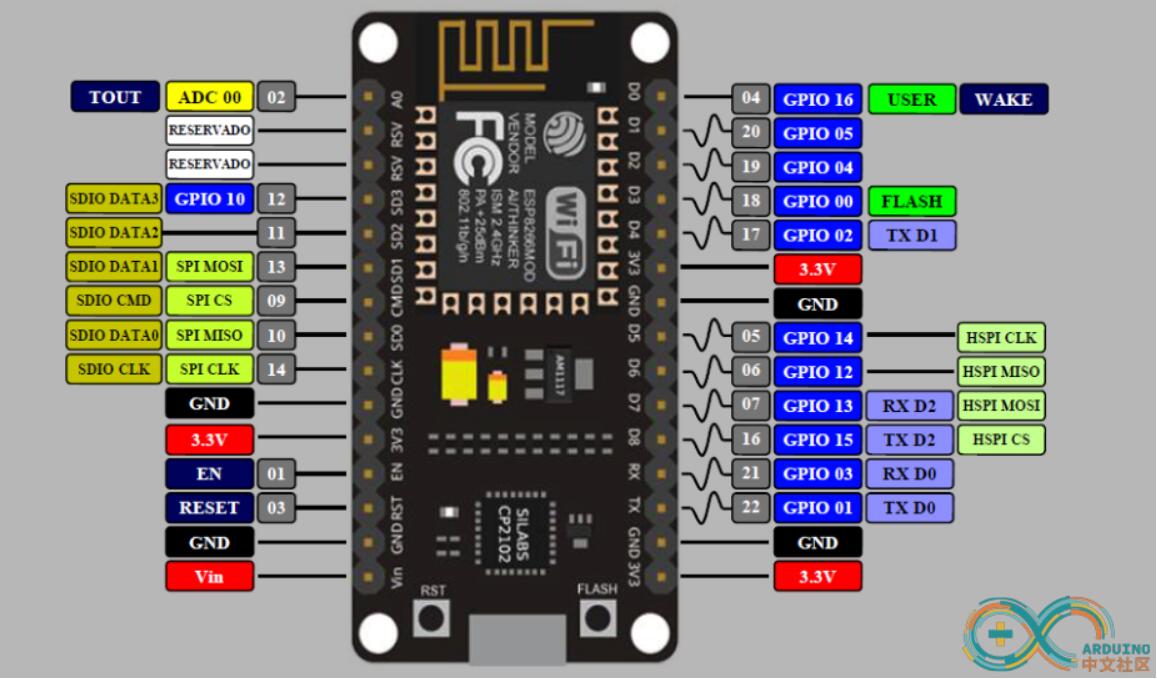
上图中,标有“正弦波”的引脚可产生PWM信号,实际上D0也可以
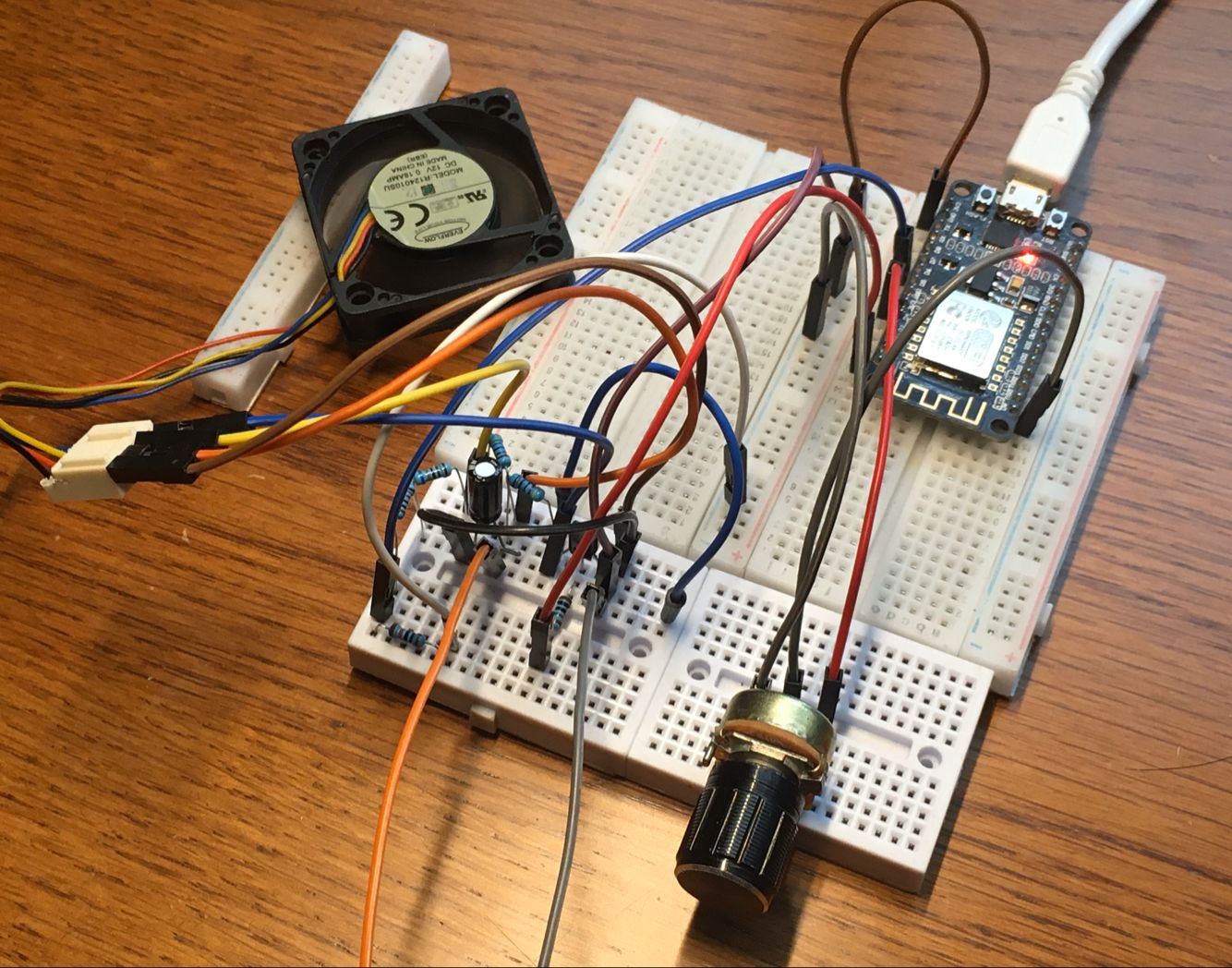
面包板搭建电路
4.安利vMicro
visual studo的arduino ide马甲程序,除了支持原版的所有功能,外加vs的标配功能,例如实时代码纠错,参数列表,自动补全,自动加载函数,等等,实在审美不了原版万年的蓝绿色,另外用vs写程序更专业😢
如何安装
在vs拓展管理中搜索arduino安装即可,使用教程网上很多,这里不做复述
5.示例代码
1 | /* |
6.Demo
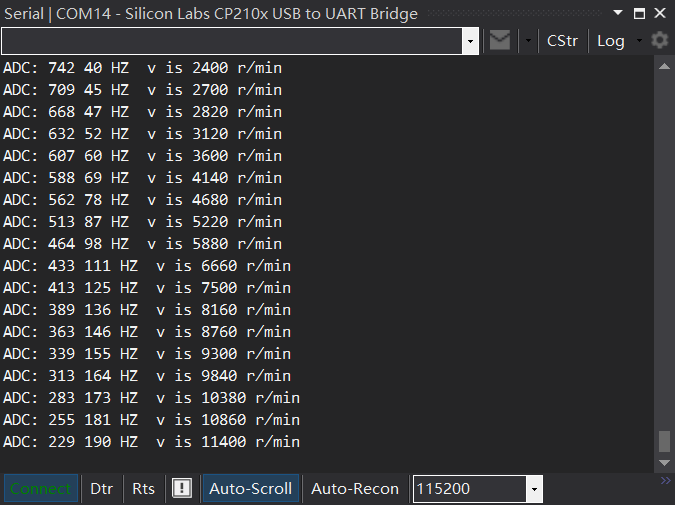
打开串口监视器,调节点位器控制风扇转速,输出如下:
7.有关代码的疑问
第35行,analogRead(),返回值范围
esp8266内置10位ADC,所以该函数返回范围0-1023,对于Arduino开发板例如Uno,该函数返回0-255
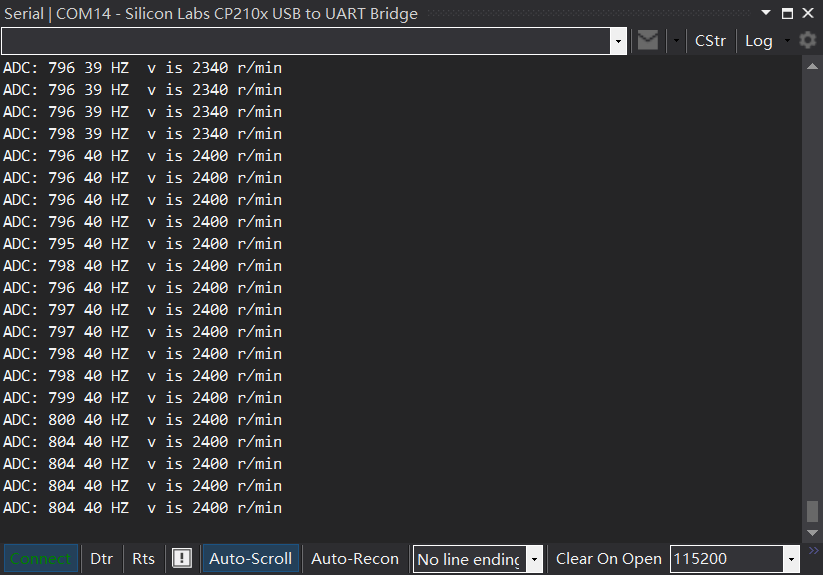
第56行,sensorValue < 720,为什么不是1023?
一般来说,12V风扇的最低转速不为0,例如猫头鹰的NF-12,其转速范围300-1500rpm,题主测试用的4010风扇,转速范围2400-128400左右,实测从A0读取的值大于720时,继续旋转电位器增大读数,风扇测速线的脉冲频率在40Hz左右不变,所以,可以认为在720时,风扇已经降至最低转速,继续减小esp8266输出的pwm占空比,并不会使风扇继续降速,如图:
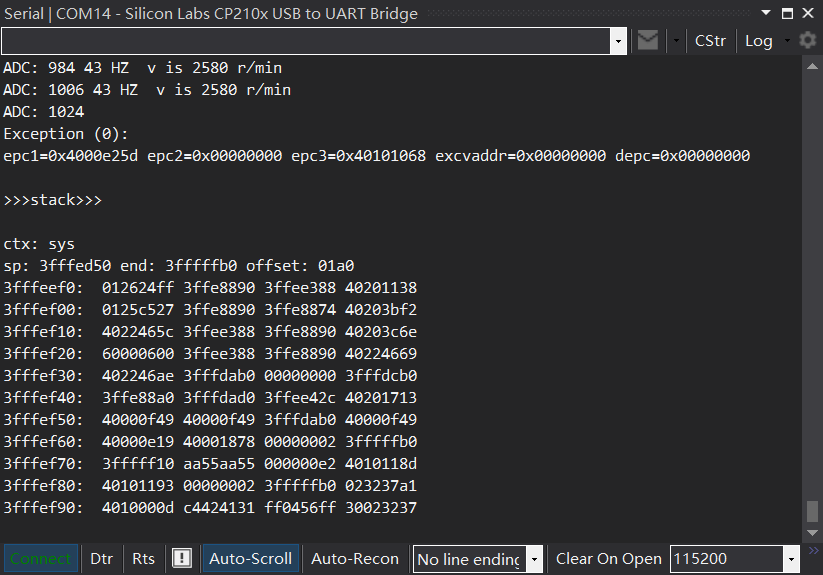
若继续增大到1023,会导致看门狗复位
众所周知,esp8266不能像Arduino那样长时间执行循环,实测当跳到1023左右时,风扇的测速线不再输出脉冲信号,因为我们在for循环中调用了多次pulseIn(),该函数默认等待超时时间为1秒,测速线停止输出脉冲,pulseIn()每次都等待1秒,超时触发看门狗,复位瞬间:
第17行,read_times取多少合适?
😳首先,题主esp8266运行主频80Mhz,在160Mhz时pulseIn()的处理可能更快
read_times示例程序中取2,使第57行for迭代2次,每一次迭代调用了2次pulseIn(),那么循环一共调用了4次pulseIn,在setup()中,我们使用Ticker对象调用attach_ms()每200ms调用read_speed(),因此,多次调用pulseIn()总共等待的时间最多为200ms,题主使用的4010风扇最低脉冲频率为40Hz,即每1000ms产生40个脉冲周期,每个脉冲周期25ms,所以理想情况下,每25ms正好触发2次pulseIn()
然而,程序执行函数时处理也需要时间,实际上每25ms执行次数小于1:
当我把 read_times取5时,40Hz时极易发生看门狗复位,此时每200ms for执行10次pulseIn(),也就是说10次耗费时间超过了200ms致使esp8266没有喘气的时间,这时定时器任务可以认为是一个死循环,说明每次执行pulseIn()的时间大于20ms,所以25ms只能触发约一次该函数的调用😮
另外,还要考虑 class_pwm()的处理耗时,题主认为read_times取3,即每200ms调用6次最坏情况总计150ms已经很极限,so,我取了2,每200ms调用4次最坏情况总计100ms
总之,这个值得根据风扇计算,对于猫头鹰NF-12,最低每秒5Hz,即每脉冲周期长达200ms,那么相应地延长Ticker的定时周期,以降低read_speed()的调用频率,也是不错的选择😃
8.参考文献
- 本文链接: http://oldgerman.github.io/f3fd3c5b/
- 版权声明: 本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!